En Física, algunas cantidades como el tiempo, la temperatura, la masa y la densidad, se pueden describir completamente con un número y una unidad. Diremos entonces que se trata de magnitudes escalares.
Sin embargo, existen otras magnitudes que están asociadas con una dirección y no pueden describirse con un sólo número. Por ejemplo, la velocidad: no solo es necesario indicar la rapidez de un avión, sino también su dirección. También ocurre igual con la magnitud física fuerza: para describirla correctamente, hay que indicar no solo su intensidad, sino también su dirección y sentido. Diremos que son magnitudes vectoriales.
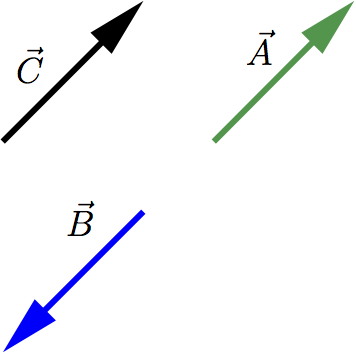
EJEMPLO: \({\overrightarrow{A}}\) y \({\overrightarrow{B}}\) son vectores con la misma magnitud y dirección, pero diferente sentido. El vector \({\overrightarrow{C}}\) tiene la misma dirección que los dos vectores anteriores. Diremos que son vectores paralelos.
La magnitud de un vector es el módulo del vector, y se expresa en la forma \(|{\overrightarrow{A}}|\). Es una cantidad escalar y siempre es positiva.
Operaciones con vectores
Suma de vectores:
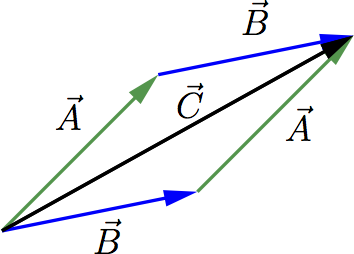
Supongamos que una partícula sufre un desplazamiento del punto \(O\) al punto \(P\), definido por el vector \({\overrightarrow{A}}={\overrightarrow{OP}}\), seguido de un segundo desplazamiento, del punto \(P\) al punto \(Q\), definido entonces por el vector \({\overrightarrow{B}}={\overrightarrow{PQ}}\). El resultado final será equivalente a considerar que la partícula parte del punto \(O\) y tiene como punto final el punto \(Q\). Es decir, podemos considerar que el desplazamiento total vendrá dado por el vector \({\overrightarrow{C}}\), que se calcula como \[{\overrightarrow{C}} = {\overrightarrow{A }}+{\overrightarrow{B}} = {\overrightarrow{B}}+{\overrightarrow{A}}\]
La suma de vectores es conmutativa, tal y como vemos en la siguiente figura
\({\overrightarrow{B}}\) es un vector con la misma dirección y sentido que \({\overrightarrow{A}}\) pero su magnitud es el doble.
La fuerza es una magnitud vectorial. Por tanto, de la expresión
\[ {\overrightarrow{F}}= m \, {\overrightarrow{a}} \,\]
podemos deducir que la dirección de \({\overrightarrow{F}}\) y \({\overrightarrow{a}}\) es la misma, el sentido también (porque \(m\) es siempre una cantidad positiva) y la magnitud de \({\overrightarrow{F}}\) es igual a la magnitud de \({\overrightarrow{a}}\) multiplicada por la masa \(m\).
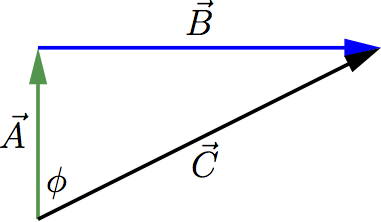
EJEMPLO: Un senderista camina desde un refugio en una llanura \(1\) km hacia el norte y \(2\) km hacia el este. ¿A qué distancia y en qué dirección está respecto al punto de partida?
Solución:
El camino que sigue el senderista puede ser descrito mediante los vectores \({\overrightarrow{A}}\), \({\overrightarrow{B}}\) y su resultante \({\overrightarrow{C}}\), tal y como se representa en la siguiente figura
La distancia al punto de partida la determinaremos mediante la magnitud del vector \({\overrightarrow{C}}\), que vendrá dada por:
La dirección nos la dará el ángulo \(\phi\) y por tanto, puede ser calculado teniendo en cuenta la magnitud de los vectores \({\overrightarrow{A}}\) y \({\overrightarrow{B}}\), \(1\) y \(2\) km, respectivamente. Por tanto
Las componentes de los vectores nos van a permitir un método sencillo pero general para sumar vectores. Supongamos que tenemos un sistema cartesiano de ejes de coordenadas. Entonces \(A_x\) es la magnitud del vector \({\overrightarrow{A_x}}\) y \(A_y\) es la magnitud del vector \({\overrightarrow{A_y}}\). \(A_x\) y \(A_y\) son las componentes del vector \({\overrightarrow{A}}\). Podemos calcular las componentes del vector \({\overrightarrow{A}}\) si conocemos la magnitud y la dirección de dicho vector. Describiremos la dirección de un vector con su ángulo \(\theta\), relativo a una dirección de referencia, que es el eje \(x\) positivo, siempre en sentido antihorario
EJEMPLO: Determina las componente \(x\) e \(y\) del vector \({\overrightarrow{D}}\), con magnitud \(|{\overrightarrow{D}}|=3\) m y siendo \(\alpha=45^{\rm o}\) (ver figura).
Solución:
Según la figura, vemos que \(D_x\) es positiva y \(D_y\) es negativa. Por tanto
El uso de componentes facilita algunos cálculos que implican vectores. Veamos algunos ejemplos
Cálculo y magnitud de un vector a partir de sus componentes:
Un vector queda descrito por su magnitud y dirección, pero también dando sus componentes. A partir de ellas, podemos calcular la magnitud y dirección del vector
Al introducir el valor \(-1\) en la calculadora para obtener el valor del arco tangente, nos dará \(-45^{\rm o}\). Este ángulo, siguiendo nuestro criterio de tomarlo respecto al eje \(x\) positivo, en sentido antihorario, es equivalente al ángulo de \(315^{\rm o}\).
Multiplicación de un vector por un escalar:
\[ {\overrightarrow{D}}= c {\overrightarrow{A}} \rightarrow D_x = c \, A_x \quad D_y = c \, A_y\]
Uso de componentes para calcular la suma de vectores:
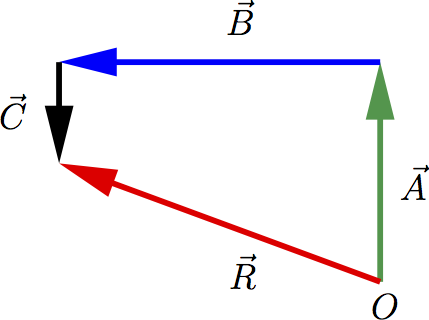
EJEMPLO: Un conductor desorientado recorre \(3.25\) km hacia el norte, \(4.75\) km hacia el oeste y \(1.50\) km hacia el sur. Calcular la magnitud y dirección del vector desplazamiento resultante, mediante la suma de las componentes.
Solución:
Teniendo en cuenta las componentes (expresadas en km):
EJEMPLO: El vector \({\overrightarrow{A}}\) tiene componentes \(A_x=1.30\) cm. \(A_y=2.25\) cm. El vector \({\overrightarrow{B}}\) tiene componentes \(B_x=4.10\) cm y \(B_y=-3.75\) cm. Calcular:
Las componentes de la resultante \({\overrightarrow{R}}={\overrightarrow{A}}+{\overrightarrow{B}}\).
La magnitud y la dirección de \({\overrightarrow{R}}={\overrightarrow{A}}+{\overrightarrow{B}}\).
Las componentes de la diferencia vectorial \({\overrightarrow{S}}={\overrightarrow{B}}-{\overrightarrow{A}}\).
La magnitud y la dirección de \({\overrightarrow{S}}={\overrightarrow{B}}-{\overrightarrow{A}}\).
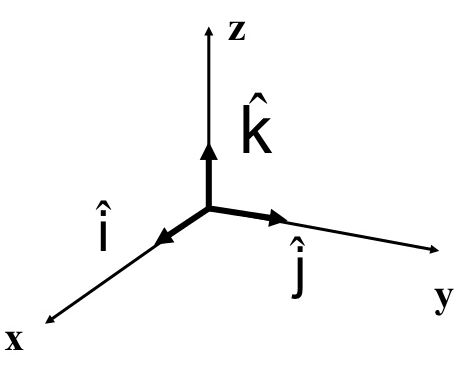
Los vectores unitarios son aquéllos con magnitud igual a \(1\) (sin unidades). Su única finalidad es dar una dirección en el espacio. Siempre los notaremos con un acento del tipo \(\hat{ }\), para indicar que se trata de un vector unitario.
\(\hat{\imath}\)\(\rightarrow\) apunta en la dirección \(x\) positiva.
\(\hat{\jmath}\)\(\rightarrow\) apunta en la dirección \(y\) positiva
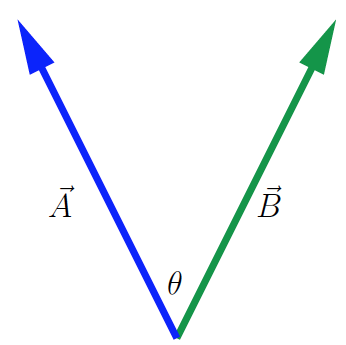
Se denota por \({\overrightarrow{A}} \cdot {\overrightarrow{B}}\) y el resultado es un escalar. Para calcularlo, representamos los vectores \({\overrightarrow{A}}\) y \({\overrightarrow{B}}\) con origen en el mismo punto.
Definimos \({\overrightarrow{A}} \cdot {\overrightarrow{B}}\) como la magnitud de \({\overrightarrow{A}}\) multiplicada por la componente de \({\overrightarrow{B}}\) paralela a \({\overrightarrow{A}}\), es decir:
Es un escalar, y puede ser positivo, negativo o cero. Si \(\theta= \pi /2\) (vectores perpendiculares) el producto escalar es siempre cero, independientemente de la magnitud de los vectores. También podemos comprobar que el producto escalar es conmutativo:
Por ejemplo, si una fuerza constante \(\vec{F}\) se aplica a un cuerpo que sufre un desplazamiento \(\vec{s}\), el trabajo \(W\) realizado por la fuerza se calculará como
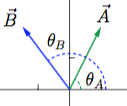
EJEMPLO: Obtener el producto escalar de los vectores \({\overrightarrow{A}}\) y \({\overrightarrow{B}}\), siendo \(|{\overrightarrow{A}}|=4\), \(\theta_A=53^{\rm o}\) y \(|{\overrightarrow{B}}|=5\), \(\theta_B=130^{\rm o}\)1
Solución:
Podemos calcular las componentes de cada uno de los vectores: \[A_x= |{\overrightarrow{A}}| \cos 53^{\rm o} = 2.407 \quad \; A_y = |{\overrightarrow{A}}| {\rm sen} 53^{\rm o}=3.195\]
El producto vectorial de los vectores \({\overrightarrow{A}}\) y \({\overrightarrow{B}}\) se denota como \({\overrightarrow{A}} \wedge {\overrightarrow{B}}\). Definimos dicho producto vectorial como un vector, perpendicular al plano que forman los vectores \({\overrightarrow{A}}\) y \(\vec{B}\), y cuya magnitud viene dada por \[|{\overrightarrow{A}} \wedge {\overrightarrow{B}}| = |{\overrightarrow{A}}| \, |{\overrightarrow{B}}| \, {\rm sen} \theta \, ,\] siendo \(\theta\) el ángulo que forman ambos vectores. La dirección y sentido del vector \({\overrightarrow{A}} \wedge {\overrightarrow{B}}\) nos lo da la regla de la mano derecha. La dirección del producto vectorial está definida por la dirección del pulgar, cerrando los demás dedos en torno al vector \({\overrightarrow{A}}\) primero y siguiendo con el vector \({\overrightarrow{B}}\).
Una propiedad del producto vectorial es que cuando ambos vectores son paralelos (\(\theta=0\), \(180^{\rm o}\)), el producto vectorial es nulo.
Teniendo en cuenta los vectores unitarios en el espacio tridimensional: