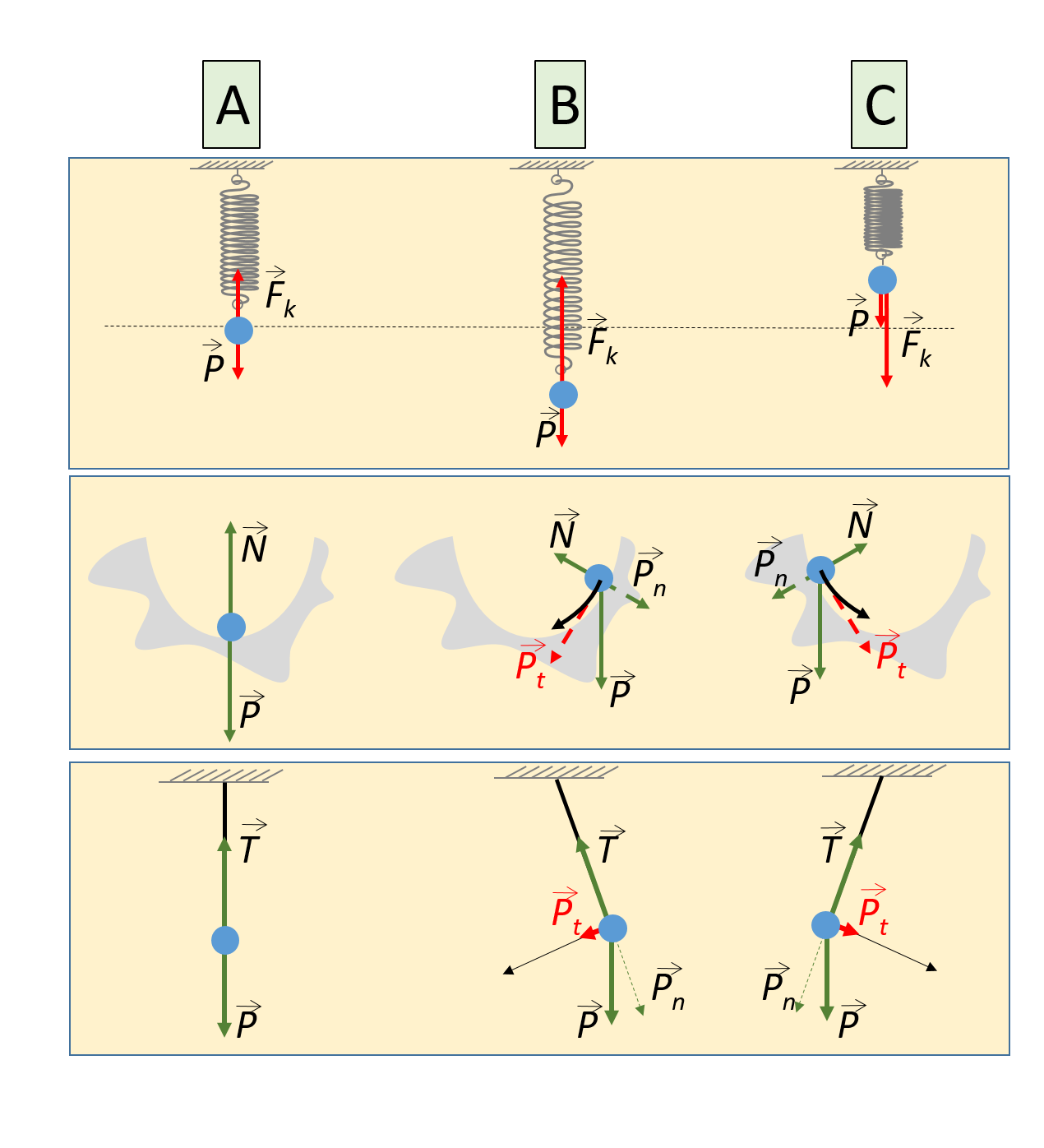
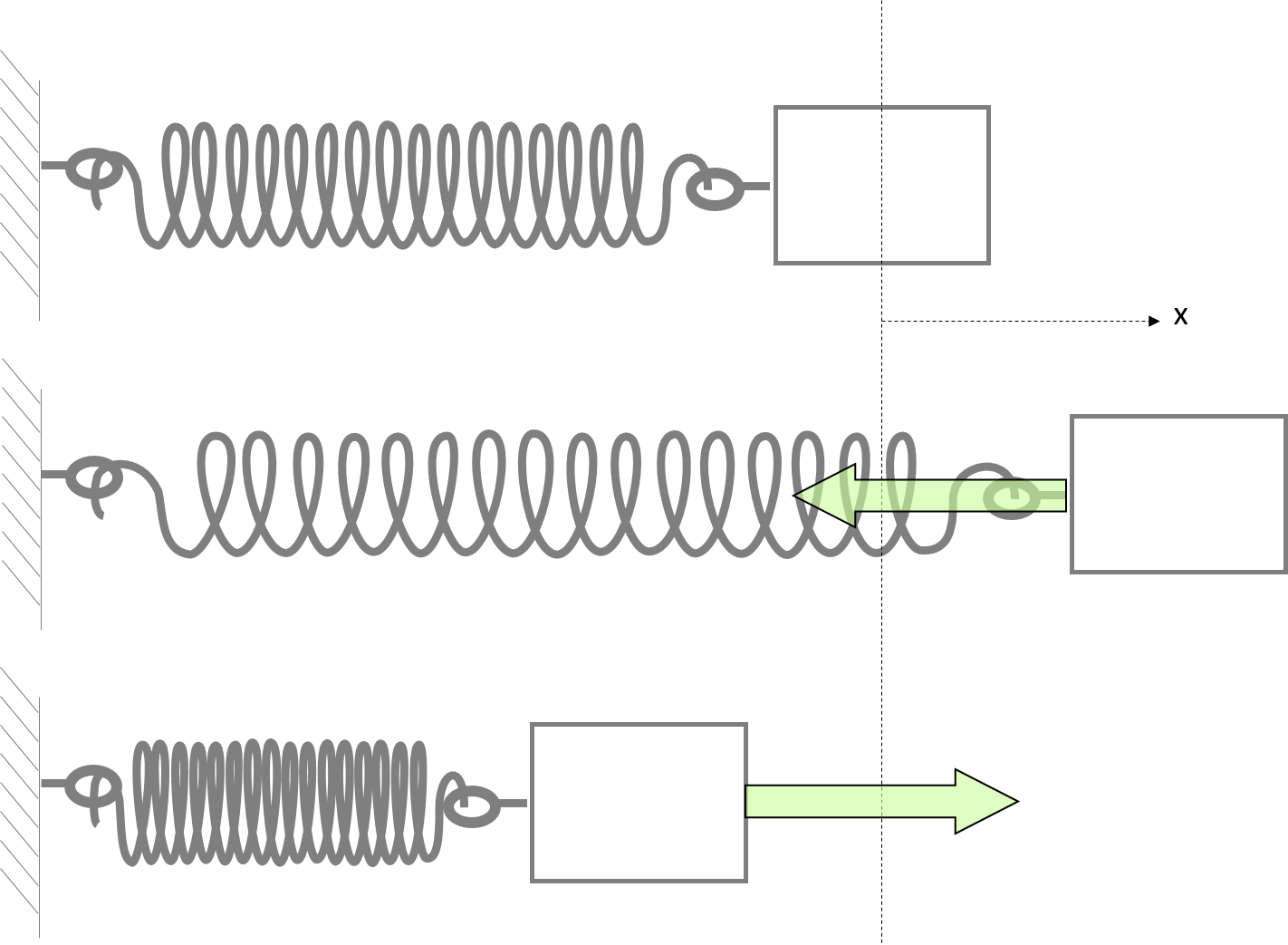
Imaginemos un cuerpo que se ve sometido a una fuerza dirigida siempre a un punto, que llamaremos de equilibrio. A tal fuerza se le llama “fuerza restauradora". Si este cuerpo se encuentra en reposo en dicha posición de equilibrio, entonces la fuerza es nula y se mantendrá en reposo. Se dice que el cuerpo está en equilibrio. Podemos imaginarnos varias situaciones de este tipo. En la figura se muestran tres ejemplos.
En el primer ejemplo, el muelle que inicialmente esté en B o C tiende a recuperar su forma natural en a). En el segundo ejemplo, el peso en b) y c) no es perpendicular a la plataforma y la rueda tiende a caer hacia la posición más baja. En el tercer ejemplo, la tensión del hilo en b) y c) no es paralelo al peso, por lo que la componente perpendicular al hilo \(P_t\) no está compensado y hacen volver al péndulo a su posición vertical.
En cualquiera de estas situaciones, el cuerpo regresa a la posición de equilibrio con una cierta velocidad. En esta posición, la fuerza neta es nula, con lo cual el cuerpo mantiene su velocidad y rebasa esta posición de equilibrio. Por lo tanto aparece una fuerza restauradora en la dirección opuesta que hará que el cuerpo se frene primero y vuelva a continuación.
Este tipo de movimiento, en el que el cuerpo se desplaza en torno a una posición de equilibrio se denomina “oscilación".
En muchos casos, el cuerpo no sólo pasa repetidas veces por su posición de equilibrio, sino que lo hace periódicamente. Es decir, el tiempo que tarda en hacer un ciclo completo es siempre el mismo. A este tipo de oscilaciones se les llama vibración armónica.
Si el cuerpo se desvía pequeñas distancias del equilibrio, entonces una buena aproximación a su movimiento viene dada por la vibración armónica simple. En este caso,
La fuerza que actúa sobre la partícula o sistema es proporcional al desplazamiento del cuerpo con respecto a su posición de equilibrio.
La posición de la partícula se pueda especificar mediante una función seno o coseno del tiempo.
Movimiento armónico simple (M.A.S.)
Se define el movimiento armónico simple como aquél que se puede describir con una función armónica del tiempo, es decir, con una función seno o coseno.
En los movimientos periódicos, la partícula se aleja una distancia máxima, a la que se llama amplitud\(A\), distancia en la que se frena completamente y se dirige de nuevo a la posición de equilibrio.
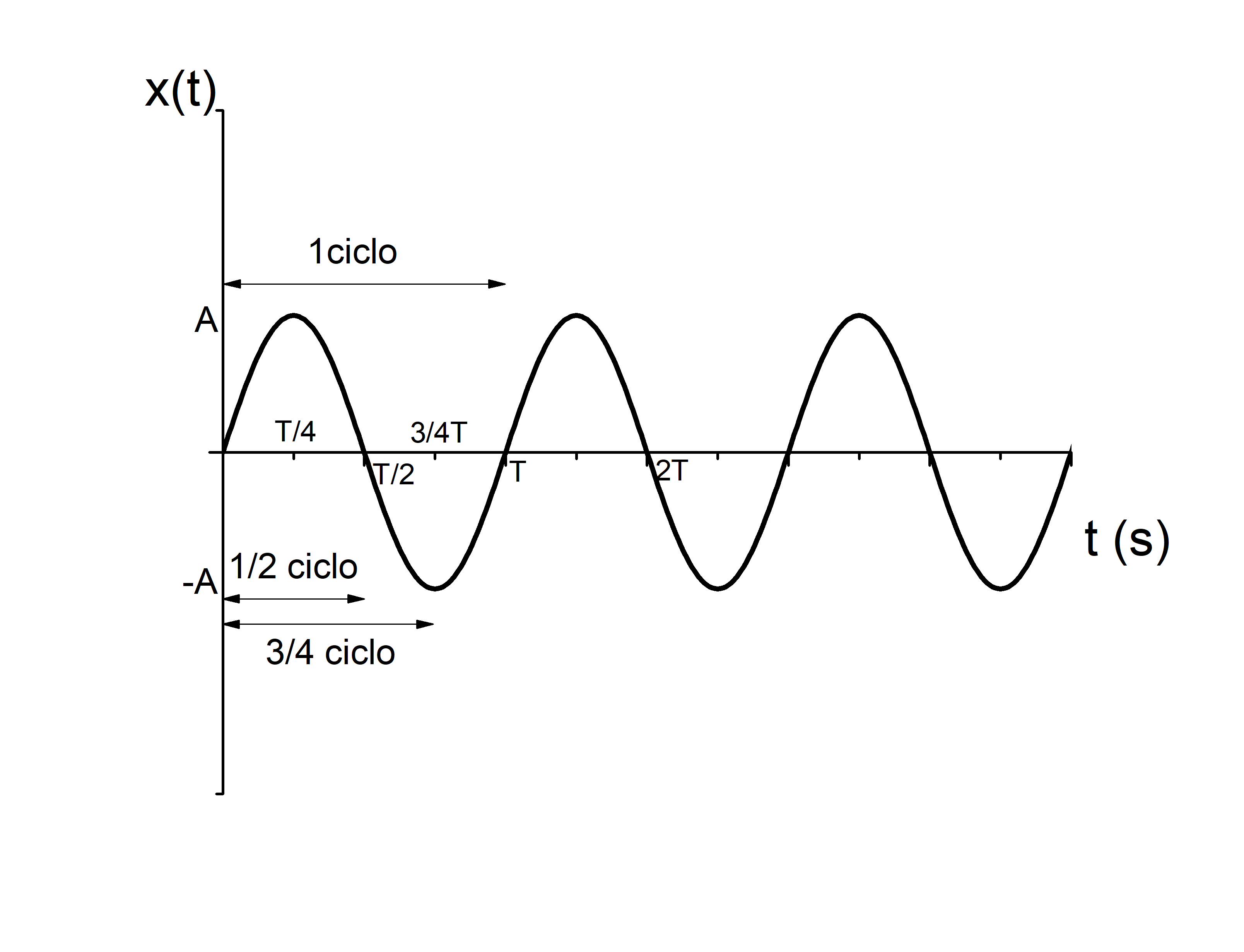
Imaginemos que en el instante inicial la partícula se encuentra en la posición de equilibrio, es decir, \(x(t=0)=0\). En cualquier otro instante de tiempo, la posición de la partícula se puede describir mediante una función del tiempo \(x(t)\) dada por: \[x(t)=A\sin\left(\varphi\right)=A\sin\left(2\pi\frac{t}{T}\right)\] donde \(\varphi\) lo denominamos la “fase" del movimiento.
En la siguiente gráfica se representa esta función. Obsérvese que para \(t=T/4\), entonces \(\sin\left(\pi/2\right)=1\), su valor máximo, y por tanto, en ese instante, \(x(T/2)=A\). Dado que el máximo valor del seno es 1, entonces, el máximo valor de \(x\) es, efectivamente, la amplitud \(A\). Del mismo modo, para \(t=3T/4\), \(\sin\left(3\pi/2\right)=-1\) entonces, \(x(3T/4)=-A\): La partícula ejecuta oscilaciones desde \(A\) hasta \(-A\). Si esperamos hasta \(t=T/4+T\), entonces de nuevo \(x(5T/4)=A\), es decir, transcurrido un periodo, la partícula vuelve al máximo.
Por tanto, \(T\) es el tiempo que tarda la partícula en ejecutar una oscilación completa. A este tiempo lo llamamos periodo. Fíjese que en medio periodo, habrá completado 1/2 ciclo, en 1/4 de periodo, 1/4 ciclo, etc.
EJEMPLO: Un objeto está oscilando sujeto a un muelle vertical. Se observa que tarda tarda 3 segundos en llegar desde su punto más alto hasta su punto más bajo. Calcule su periodo.
Solución:
Si observamos la figura anterior, el recorrido entre el punto más alto, es decir, cuando \(x=A\), hasta el punto más bajo, es decir, cuando \(x=-A\), es la mitad del ciclo completo y tardará por lo tanto \(T/2\). Por lo tanto, si tarda \(t=3 \text{ s}\), el periodo será el doble: \(T=6 \text{ s}\).
Se define la frecuencia como el número de ciclos por unidad de tiempo. Para calcularlo, basta con tener en cuenta que en un tiempo \(T\) se ejecuta una oscilación, es decir, \[f=\frac{1}{T}\] Como el tiempo se mide en segundos, la frecuencia se mide en s\(^{-1}\). A esta unidad se le conoce como hercio (Hz). Fíjese que con esta definición, en un cierto tiempo \(t\) ejecutará \(N=ft\) oscilaciones.
EJEMPLO: Un objeto está oscilando sujeto a un muelle vertical. Se observa que tarda tarda 5 segundos en realizar 10 oscilaciones. Calcule su periodo y su frecuencia.
Solución:
El periodo será el tiempo que tarda en realizar una
oscilación:
\[T=\frac{t}{N}=\frac{5 \text{ s}}{10}=0.5 \text{ s}\]
Por otro lado, la frecuencia es el número de oscilaciones en
la unidad de tiempo:
\[f=\frac{N}{t}=\frac{1}{T}=2 \text{ Hz}\]
Finalmente, recordemos que la función seno o coseno es cíclica cuando su argumento (al que llamamos fase), llega a 2\(\pi\). Por ello, es usual definir la frecuencia angular\(\omega\) como la fase en radianes por unidad de tiempo. Como un ciclo completo son 2\(\pi\) radianes, la frecuencia angular será: \[\omega=2\pi f\] y se mide en rad/s. De este modo es fácil ver que el M.A.S. se puede describir con la función: \[x(t)=A\sin\left(\omega t\right)\]
En resumen:
\(x(t)=A\sin\left(\omega t\right)\)
Nombre
Abreviatura
Unidad
Equivalencia
Amplitud
\(A\)
m
Periodo
\(T\)
s
Frecuencia
\(f\)
Hz
\(\frac{1}{T}\)
Frecuencia angular
\(\omega\)
rad/s
\(\frac{2\pi}{T}=2\pi f\)
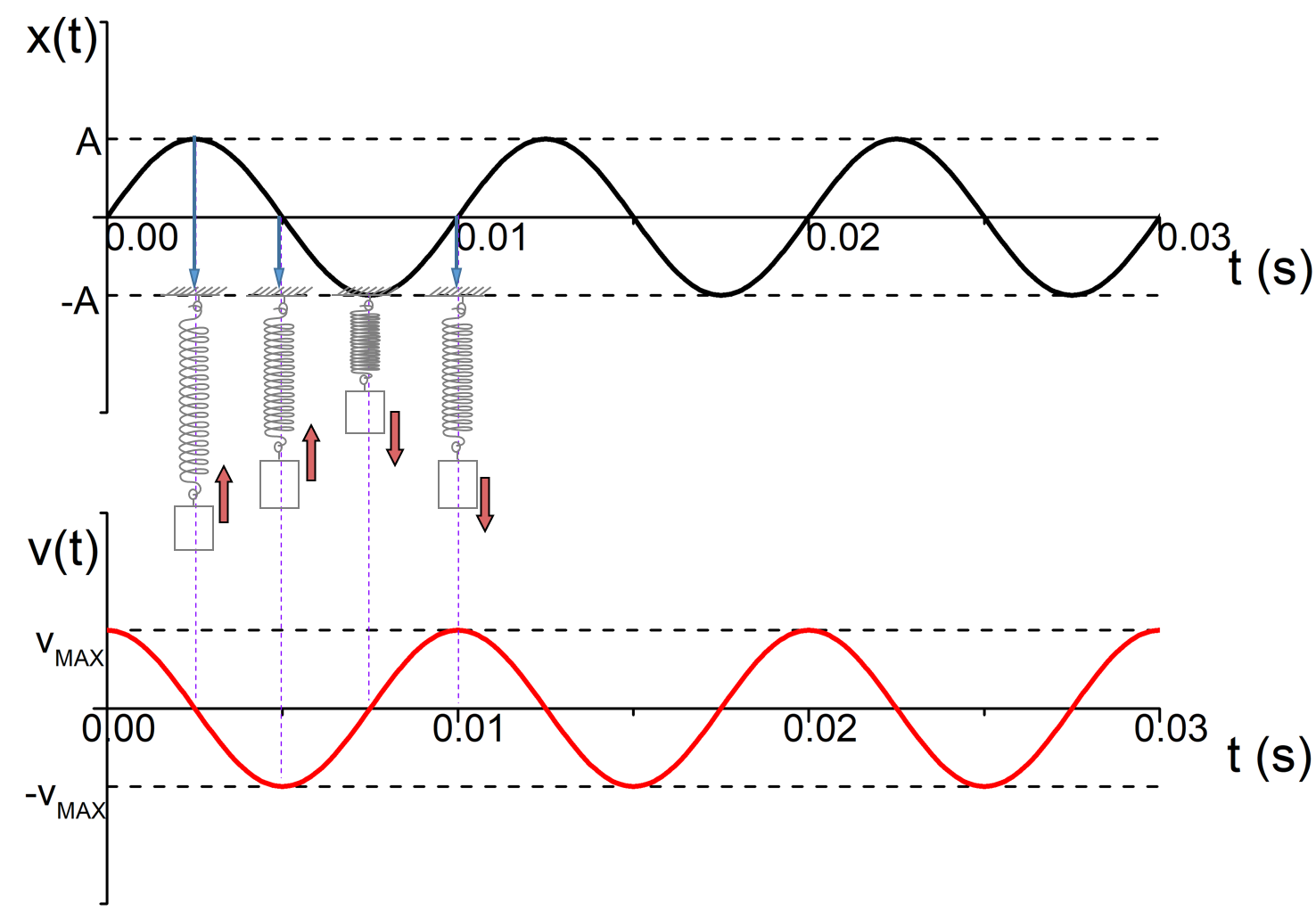
En este movimiento, no sólo varía la posición. Nótese que la partícula se frena al llegar a la máxima amplitud y luego invierte la dirección del movimiento. La velocidad la podemos calcular como la variación temporal de la posición: \[v=\frac{\mbox{d}x}{\mbox{d}t}=A\omega\cos\left(\omega t\right)\] Dado que los límites de la función coseno son también \(\pm\)1, entonces la velocidad oscila también con el tiempo desde un valor máximo \(v_{MAX}=A\omega\) hasta el valor mínimo \(-v_{MAX}\), pero lo hace desfasada \(\pi/2\) respecto de la posición. En efecto, cuando el muelle está estirado, la masa se para (\(v=0\)) e inicia su movimiento ascendente (velocidad negativa). Cuando pasa por la posición de equilibrio, la velocidad es máxima y continúa su ascenso a velocidad negativa pero decreciente en valor absoluto. Cuando el muelle está comprimido, la masa se vuelve a frenar (\(v=0\)) e inicia el descenso (velocidad positiva). En resumen, cuando \(x\) es máxima en valor absoluto, entonces la velocidad es cero y viceversa.
\(x=A\)
\(v=0\)
\(A>x>0\)
\(v<0\) creciente en valor absoluto
\(x=0\)
\(v=-v_{MAX}\)
\(0>x>-A\)
\(v<0\) decreciente en valor absoluto
\(x=-A\)
\(v=0\)
\(-A < x < 0\)
\(v>0\) creciente en valor absoluto
Este caso particular nos ha servido para entender las características principales del M.A.S. Fijémosnos ahora en el instante incial del movimiento, es decir, \(t=0\). Si observamos de nuevo la gráfica anterior, podemos ver que en el instante inicial \(t=0\) el objeto parte de la posición de equilibrio \(x(0)=0\) con la velocidad máxima \(v(0)=v_{MAX}\). Sin embargo, no todas las oscilaciones son así. Por ejemplo, podríamos haber iniciado el movimiento estirando o comprimiendo el muelle y soltándolo en el instante inicial. En este caso, las ecuaciones anteriores no son correctas porque no describen el movimiento real. Otra opción podría haber sido partir de una posición intermedia a una velocidad. Por tanto, cuando se estudia un movimiento es muy importante tener en cuenta las “condiciones" iniciales del movimiento. Éstas se expresan indicando \(x(t=0)\) (o bien, simplemente \(x(0)\)) y \(v(t=0)\) (o bien, simplemente \(v(0)\)).
Veamos cómo se actúa en este caso. En el ejemplo del muelle estirado que se suelta en el instante inicial, la velocidad inicial es \(v(0)=0\). Hemos visto en la tabla anterior que cuando la velocidad es nula, la masa tiende a volver a su posición de equilibrio. Esto quiere decir que la elongación es máxima: \(x(0)=A\). Esto se cumple si escribimos, para cualquier otro instante de tiempo: \[x(t)=A\sin\left(\omega t+\pi/2\right)\] Efectivamente, si sustituimos \(t=0\) en la ecuación anterior, obtenemos \(x=A\). Para la velocidad, como es la derivada temporal de la posición: \[v(t)=\frac{\mbox{d}x}{\mbox{d}t}=A\omega\cos\left(\omega t+\pi/2\right)\]
Y como hemos llamado \(v_{MAX}\) al valor máximo de la velocidad, entonces: \[v(t)=A\omega\cos\left(\omega t+\pi/2\right)=v_{MAX}\cos\left(\omega t+\pi/2\right)\] Y por tanto, \[v_{MAX}=A\omega\] Vemos, pues, que podemos utilizar la misma función trigonométrica, modificando ligeramente su argumento para incluir lo que llamamos fase inicial. La fase inicial en este ejemplo es \(\varphi_0=\pi/2\).
En el caso completamente general, podemos decir que en \(t=0\), la fase del ciclo \(\varphi_0\) no tiene por qué ser ni cero ni \(\pi/2\). Por ello, el modo más general de describir el M.A.S. es mediante:
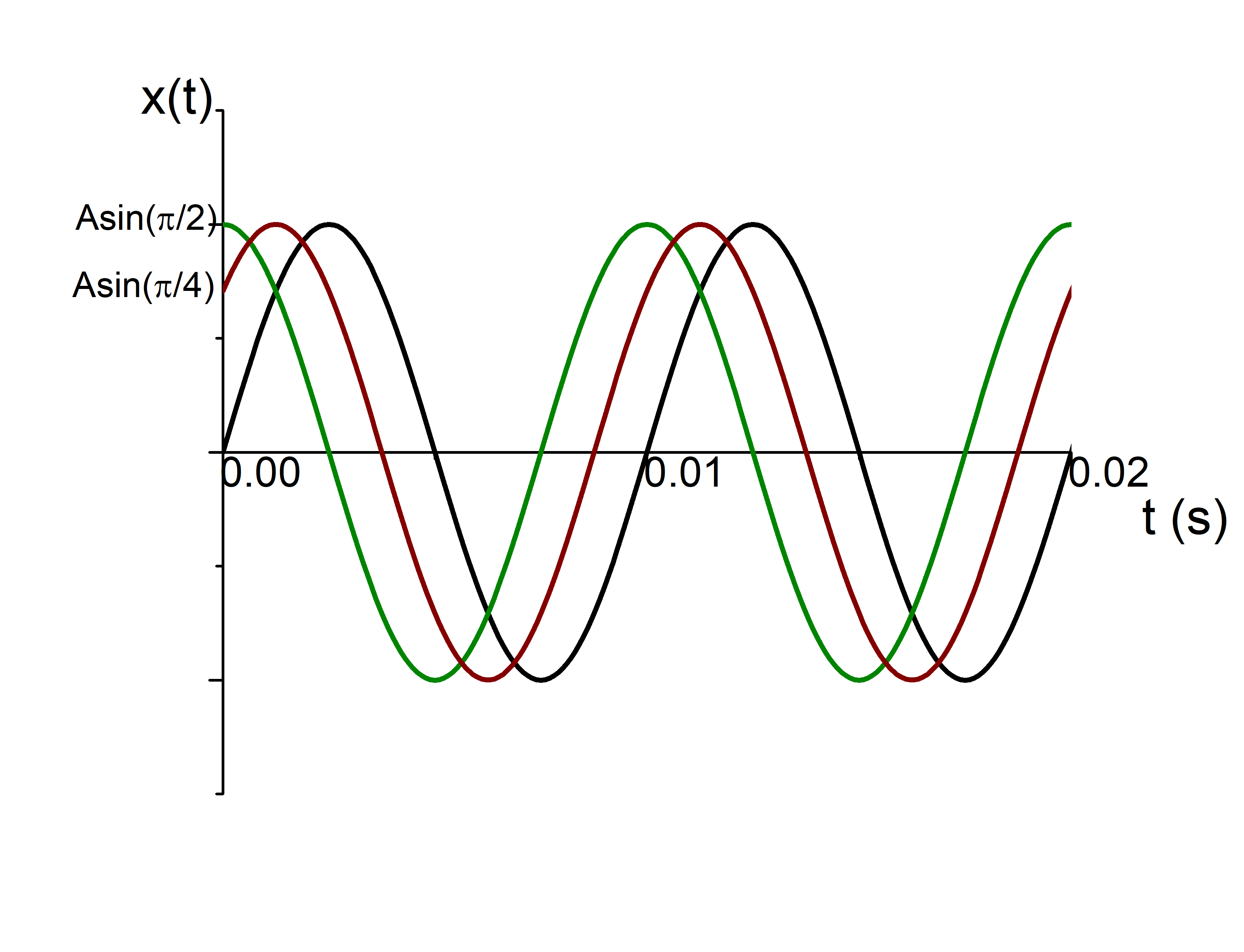
En la siguiente gráfica se muestran tres casos. La línea negra corresponde con el caso \(\varphi_0=0\), es decir, la masa parte de la posición de equilibrio. La línea verde es el caso \(\varphi_0=\pi/2\), es decir, la masa parte de la máxima elongación en reposo. La línea roja es el caso \(\varphi_0=\pi/4\), que es un caso intermedio: la masa parte de una distancia menor que la máxima con una velocidad menor que la velocidad máxima.
En un caso cualquiera, para poder determinar la posición y velocidad en cualquier instante, tendremos en cuenta que:
\(x(t=0)=A\sin\left(\varphi_0\right)\)
\(v(t=0)=A\omega\cos\left(\varphi_0\right)\)
Típicamente, si en un problema nos dan la frecuencia y la posición y velocidad iniciales, entonces, de las dos ecuaciones anteriores se obtiene la amplitud del movimiento y la fase inicial.
EJEMPLO: Tenemos una oscilación de frecuencia \(\omega = 20 \text{ rad/s}\) . Inicialmente, la masa se encuentra en \(x = 1 \text{ m}\)
respecto de la posición de equilibrio y con una velocidad de
\(v = 20 \text{ m/s}\). Encuentre la función que describe la posición
y velocidad en cualquier instante.
Solución:
En general, sabemos que:
\[x(t) = A \sin(\omega t + \varphi_0) = A \sin(20t+ \varphi_0)\]\[v(t) = A \omega \cos(\omega t + \varphi_0) = 20 A \cos(20t+ \varphi_0)\]
Nos dan los valores en el instante inicial: \(x(0) = 1 \text{ m} = A \sin (\varphi_0)\). \(v(0) = 20 \text{ m/s} = 20 A \cos (\varphi_0)\).
De esta última ecuación:
\[v(0)/20 = 20/20 = 1 = A \cos (\varphi_0)\]
Y por tanto,
\[\frac{x(0)}{v(0)/20} = \frac{A \sin(\varphi_0)}{A \cos(\varphi_0)} = tan(\varphi_0)\]
Como \(\frac{x(0)}{v(0)/20} = 1\), entonces,
\[\varphi_0 = \pi/4\]
Además, \(x(0) = 1 \text{ m} = A \sin (\varphi_0)\), por lo tanto
\[\frac{x(0)}{\sin(\varphi_0)} = \sqrt{2}\]
Finalmente: \[x(t) = \sqrt{2} \sin(20t + \pi/4) \text{ m} = 1.41 \sin(20t+ \pi/4) \text{ m}\]\[v(t) = \sqrt{2} \cdot 20 \cos(20t + \pi/4) \text{ m/s} = 28.3 \cos(20t+ \pi/4) \text{ m/s}\]
Ley de Hooke
Como ya se adelantó, un cuerpo oscila cuando sobre él actúa una fuerza recuperadora, es decir, una fuerza que se dirige siempre hacia una posición, que es la posición de equilibrio. Tomemos el caso de una masa sujeta a un muelle:
A medida que la partícula se desplaza hacia la derecha (segundo dibujo), el muelle se estira y por tanto ejerce una fuerza sobre la masa hacia la izquierda. En el tercer dibujo el muelle se opone a ser comprimido, por lo que la fuerza lleva el sentido positivo del eje x. Si situamos el origen de coordenadas en la posición de equilibrio, tal y como se muestra en esta figura, entonces la fuerza que ejerce el muelle es: \[\vec{F}=-kx\hat{\imath}\] siendo \(k\) la “constante elástica del muelle". Esta es la denominada “ley de Hooke".
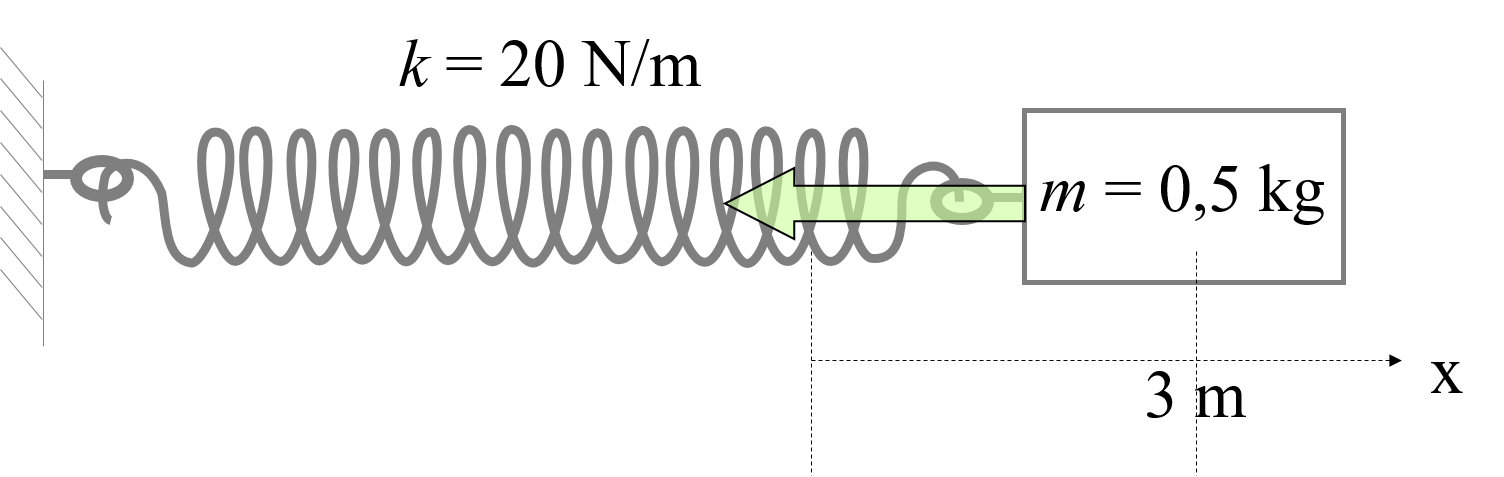
EJEMPLO: Si tenemos un muelle de constante k = 20 N/m,
calcule la fuerza que ejerce sobre una masa m = 0.5
kg, cuando ésta esté situada a 15 cm de la posición de
equilibrio. ¿Con qué aceleración se mueve?
Solución:
\(\vec{F}=-kx\hat{\imath}\), entonces:
\[\vec{F}=-20 \text{ N/m} \cdot 0.15\text{ m }\hat{\imath} = -3 \text{ N }\hat{\imath}\]
Para calcular la aceleración \(\vec{a}\), utilizamos la segunda ley de
Newton: \(\vec{F}=m\vec{a}\), por lo que
\[\vec{a}= \frac{\vec{F}}{m} = -\frac{3\text{ N}}{0.5 \text{ kg}}\hat{\imath} = -6 \text{ m/s}^2\text{ } \hat{\imath}\]
Como la única fuerza es la que ejerce el muelle, por la segunda ley de Newton: \[\sum\vec{F}=-kx\hat{\imath}=m\frac{d^2x}{dt^2}\hat{\imath}\] Cuando una masa está sometida a una fuerza de este tipo, entonces su posición viene descrita por un M.A.S. Es decir, \[x(t)=A\cos\left(\omega t+\varphi_0\right)\] Por lo tanto su velocidad será: \[\vec{v}(t)=v_x(t)\hat{\imath}=\frac{dx}{dt}\hat{\imath}=-\omega A\sin\left(\omega t+\varphi_0\right)\hat{\imath}\] Y su aceleración: \[\vec{a}(t)=\frac{d\vec{v}}{dt}=-\omega^2A\cos\left(\omega t+\varphi_0\right)\hat{\imath}\] En definitiva nos queda: \[\sum\vec{F}=-kx\hat{\imath}=-kA\cos\left(\omega t+\varphi_0\right)\hat{\imath}\]\[m\frac{d^2x}{dt^2}\hat{\imath}=-m\omega^2A\cos\left(\omega t+\varphi_0\right)\hat{\imath}\] E igualando: \[-kA\cos\left(\omega t+\varphi_0\right)=-m\omega^2A\cos\left(\omega t+\varphi_0\right)\] Por lo tanto: \[\omega=\sqrt{\frac{k}{m}}\]
El muelle vertical
Hemos visto que cuando sobre una masa actúa una fuerza del tipo \(\vec{F}=-kx\hat{\imath}\), siendo \(x\) la distancia respecto de la posición de equilibrio, entonces el objeto realiza un movimiento armónico simple. Veamos que esto es válido también cuando además de esta fuerza, actúa otra constante.
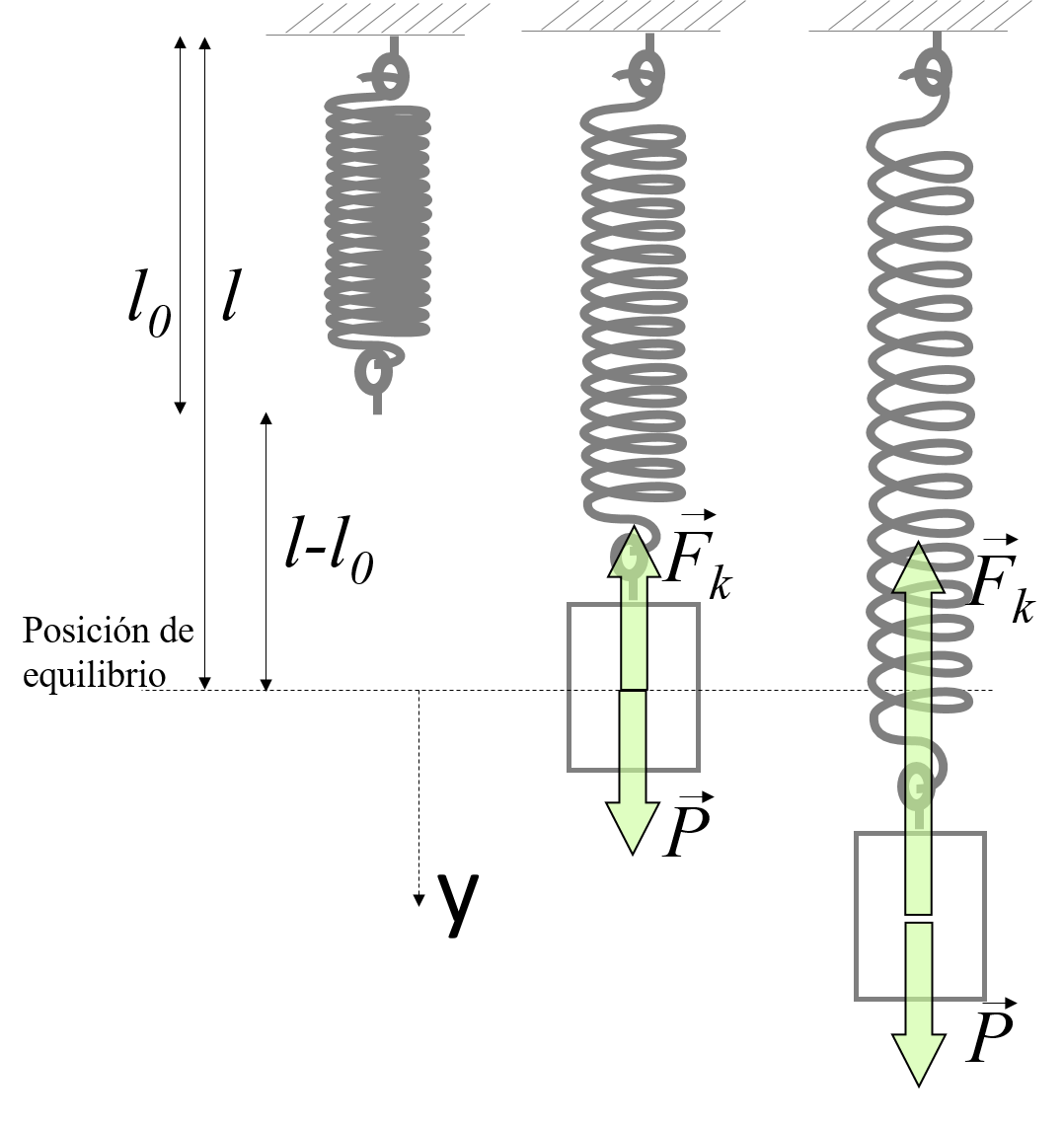
Un ejemplo es el muelle vertical. En este caso, además de la fuerza del muelle, actúa la fuerza gravitatoria. En la siguiente figura se esquematiza esta situación.
En el primer caso, el muelle no tiene ningún peso, por lo que su longitud es la longitud natural del muelle, \(l_0\). A continuación se suspende una masa \(m\). Como consecuencia, el muelle se alarga un poco hasta encontrar el equilibrio. En esta posición de equilibrio (segundo dibujo), la suma de fuerzas ha de ser nula: \[\sum\vec{F}=\vec{F}_k+\vec{P}=0\] Por lo tanto,
\(-k(l-l_0)\hat{\jmath}+mg\hat{\jmath}=0\), es decir: \[-k(l-l_0)+mg=0\]
En el tercer dibujo, la elongación del muelle es mayor, por lo que la fuerza del muelle supera al peso y habrá una componente neta en dirección hacia arriba. En este caso, la elongación del muelle es \(l+y-l_0\) por lo que la fuerza neta es: \[\sum\vec{F}=\vec{F}_k+\vec{P}=-k(l-l_0+y)\hat{\jmath}+mg\hat{\jmath}\] Reagrupando: \[\sum\vec{F}=-ky\hat{\jmath}\underbrace{-k(l-l_0)\hat{\jmath}+mg\hat{\jmath}}\] El contenido dentro de la llave hemos visto que es nulo, por lo que: \[\sum\vec{F}=-ky\hat{\jmath}\] Y por la segunda ley de Newton: \[\sum\vec{F}=m\vec{a}=-ky\hat{\jmath}\] que se corresponde con la ley de Hooke. Es decir, cuando el muelle está en posición vertical, el objeto realiza un M.A.S. pero desde una posición de equilibrio diferente, en la que el muelle está algo deformado.
Con esta situación tenemos un modo de calcular la constante de un muelle. Si colgamos una masa conocida y determinamos la elongación de equilibrio \(l-l_0\), la constante del muelle se determina a partir de: \[-k(l-l_0)\hat{\jmath}+mg\hat{\jmath}=0\] Es decir, en el equilibrio la suma de fuerzas es 0. Y despejando la constante del muelle, podemos calcularla a partir de la siguiente ecuación:\[k=\frac{m g}{l-l_0}\]
Energía del oscilador armónico simple
El oscilador armónico tiene una energía mecánica dada por: \[E_m=E_p+E_c\] siendo \(E_c\) la energía cinética de la masa y \(E_p\) la energía potencial del muelle que tiene el muelle cuando está deformado. Esta energía viene dada por: \[E_p=\frac{1}{2}kx^2\] Como \[x(t)=A\sin\left(\omega t+\varphi_0\right)\] tendremos entonces que: \[E_p=\frac{1}{2}kA^2\sin^2\left(\omega t+\varphi_0\right)\] Fíjese que la energía potencial será máxima cuando el muelle esté totalmente estirado o comprimido, instantes en los que \(x=\pm A\) y por lo tanto: \[E_{p,MAX}=\frac{1}{2}kA^2\]
Por otro lado, la masa en su movimiento tiene una energía cinética: \[E_c=\frac{1}{2}mv^2\] Como: \[v(t)=\frac{dx}{dt}=\omega A\cos\left(\omega t+\varphi_0\right)\] se obtiene que: \[E_c=\frac{1}{2}m\omega^2A^2\cos^2\left(\omega t+\varphi_0\right)\] Y dado que \(\omega=\sqrt{\frac{k}{m}}\), entonces: \[E_c=\frac{1}{2}kA^2\cos^2\left(\omega t+\varphi_0\right)\]
El valor máximo de la energía cinética será: \[E_{c,MAX}=\frac{1}{2}kA^2\]
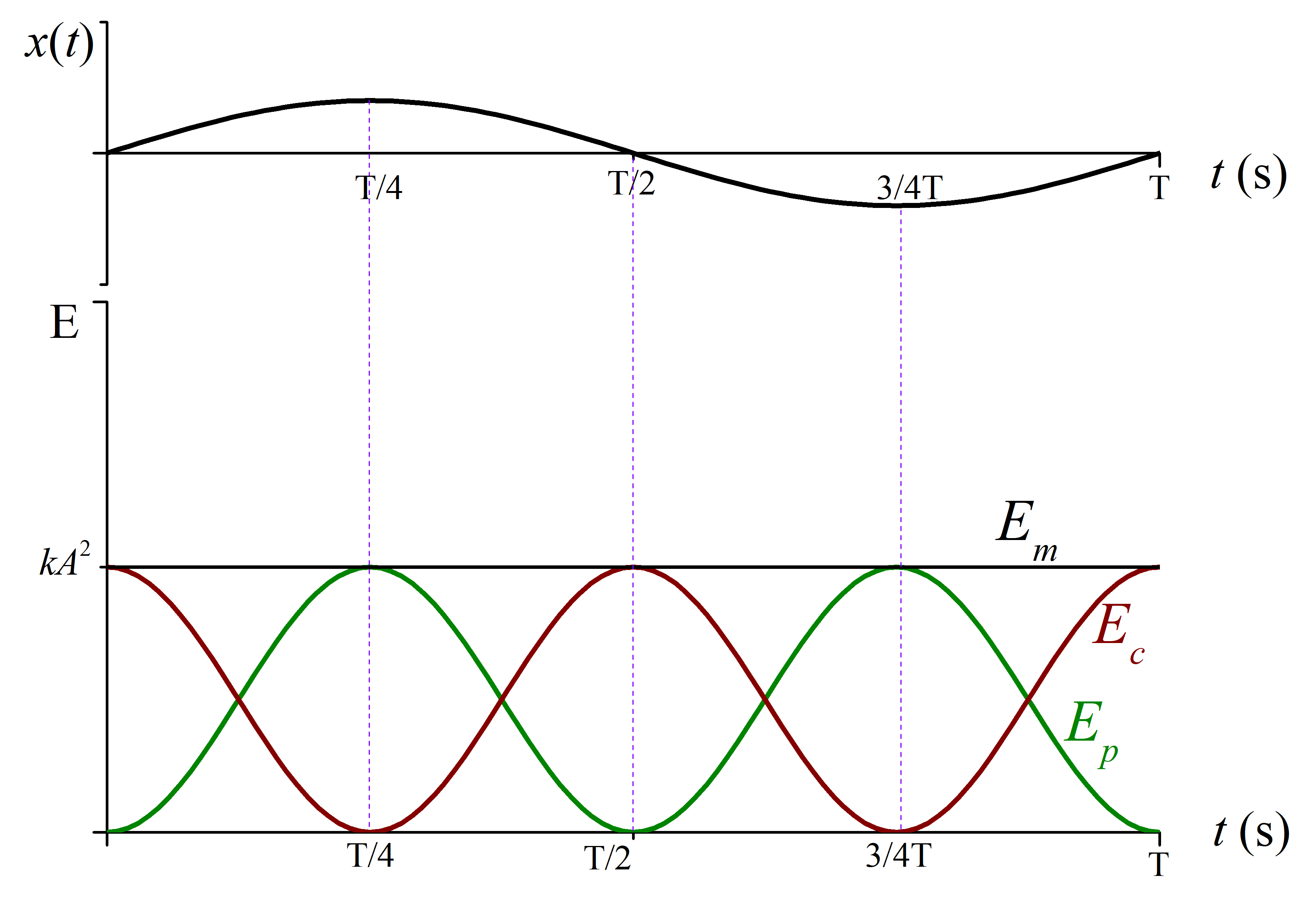
Exactamente igual que el valor máximo de la energía potencial. Fíjese que en realidad estos valores de energía se alcanzan en instantes diferentes. En efecto, cuando la velocidad es máxima (y por tanto tambié la energía cinética), la posición es la de equilibrio (\(x=0\), ya que la velocidad y la posición están desfasados \(\pi/2\)), y por tanto la energía potencial es nula. Igualmente, cuando la posición es máxima (y por tanto, la energía potencial), la velocidad es nula, y por tanto, la energía cinética es nula. Dicho de otro modo:
Cuando el muelle está totalmente estirado o comprimido, la energía potencial es máxima y la energía cinética nula, mientras que cuando el muelle no está deformado, la energía potencial es nula y la energía cinética máxima.
Esto se ilustra en la siguiente figura.
La energía mecánica total será: \[E_m=E_c+E_p=\frac{1}{2}kA^2\cos^2\left(\omega t+\varphi_0\right)+\frac{1}{2}kA^2\sin^2\left(\omega t+\varphi_0\right)\]
Y sacando factor común \(\frac{1}{2}kA^2\), tendremos \[E_m=\frac{1}{2}kA^2\left[\cos^2\left(\omega t+\varphi_0\right)+\sin^2\left(\omega t+\varphi_0\right)\right]\] Si tenemos en cuenta que \(\cos^2R+\sin^2R=1\), tendremos: \[E_m=\frac{1}{2}kA^2\]
Puede verse que aunque tanto la energía cinética como la energía potencial varían con el tiempo, la suma permanece constante, es decir,
La energía mecánica de un oscilador armónico se conserva
De este modo, cuando la masa se aleja de la posición de equilibrio, empieza a frenarse, disminuye su energía cinética hasta que se para y retrocede. Al mismo tiempo, la energía potencial va aumentando hasta llegar a su valor máximo cuando la masa se ha parado.
El péndulo
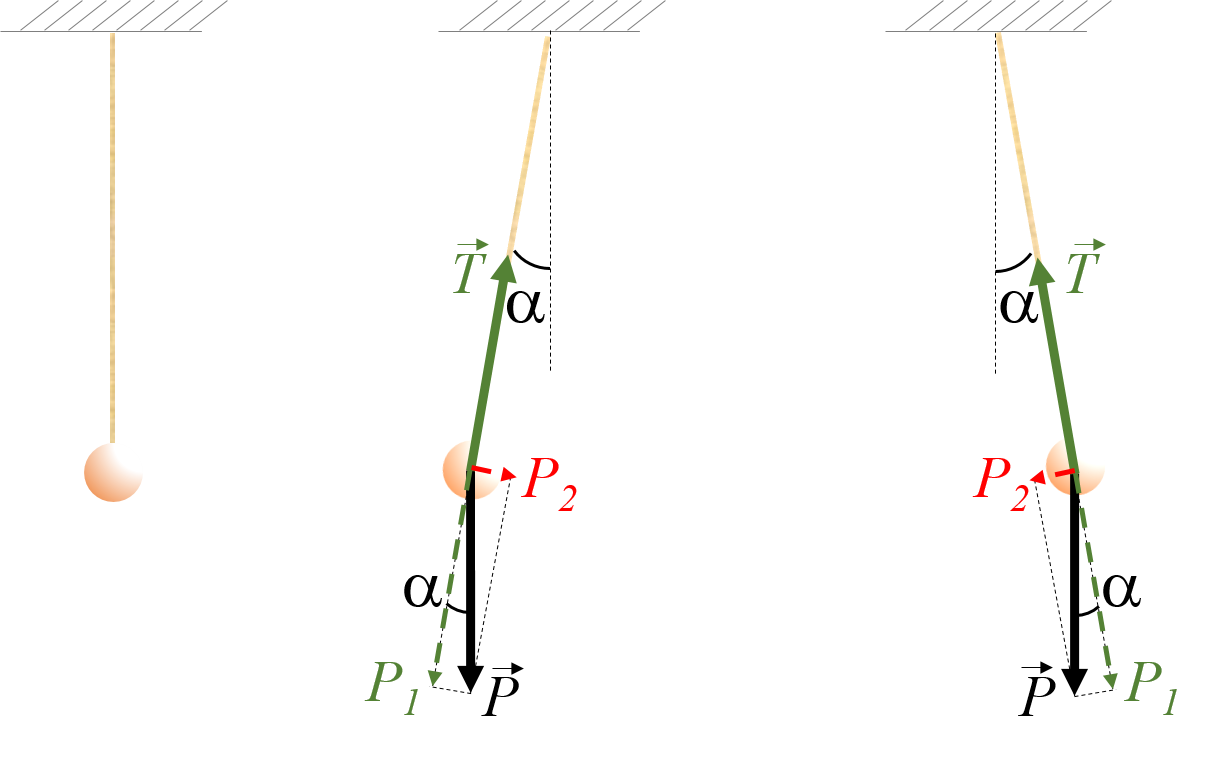
Imaginemos una cuerda de longitud \(L\) fija en su extremo superior. Supongamos que es muy ligera. En el extremo inferior sujetamos un cuerpo de masa \(m\). En este sistema, las únicas fuerzas que actúan sobre dicho cuerpo son su peso y la tensión de cuerda. Mientras que la primera será siempre vertical, la segunda llevará la dirección de la cuerda.
Por tanto, en el equilibrio, la cuerda estará en posición vertical, de modo que la tensión de la cuerda compensa el peso de dicho cuerpo. Si desplazamos la masa hacia la izquierda, tal y como se muestra en el segundo dibujo, entonces la tensión de la cuerda y el peso no llevarán la misma dirección. Si separamos el peso en componentes radial \[P_1=P\cos\alpha\] y tangencial \[P_2=P\sin\alpha=P\frac{x}{L}\] dado que la tensión de la cuerda tiene dirección radial, entonces sólo compensará a la componente \(P_1\), mientras que la componente tangencial del peso será la responsable del movimiento. Por lo tanto, el objeto se moverá en dirección tangencial, es decir, describiendo arcos.
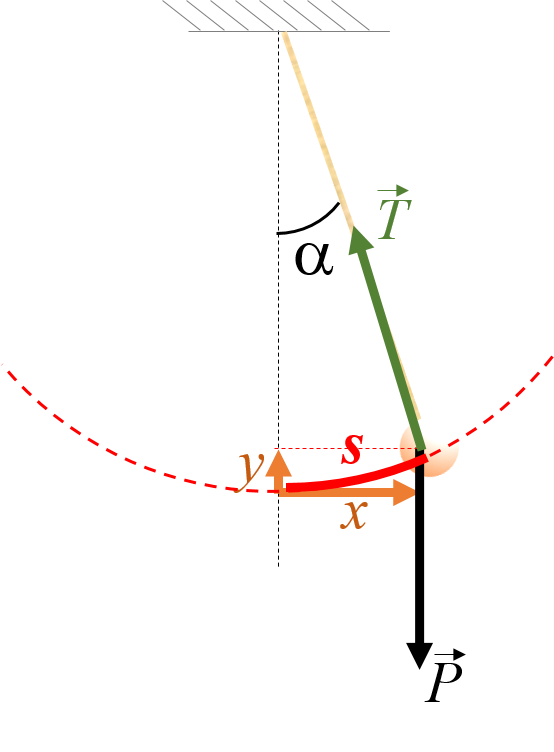
En la siguiente figura se muestra un esquema: en un instante cualquiera, tendremos que la cuerda se ha desviado desde la vertical un ángulo \(\alpha\), de modo que el arco descrito \(s=L\alpha\).
Si el ángulo \(\alpha\) es pequeño, entonces el arco \(s\) que describe el péndulo es prácticamente igual a \(x\), y por tanto el movimiento tiene lugar prácticamente en la horizontal, es decir,
\[a_t=\frac{d^2s}{dt^2}\approx\frac{d^2x}{dt^2}\]
Finalmente: \[-m\frac{g}{L}x=m\frac{d^2x}{dt^2}\] Esta ecuación es idéntica a la ecuación de la ley de Hooke, si hacemos la equivalencia \(k=mg/L\). Por lo tanto, siempre y cuando el ángulo sea pequeño, el péndulo realizará un movimiento armónico simple de frecuencia: \[\omega=\sqrt{\frac{g}{L}}\]
La ecuación del movimiento será: \[x(t)=A\sin\left(\omega t+\varphi_0\right)\]
Y su velocidad: \[v(t)=\omega A\cos\left(\omega t+\varphi_0\right)\] Fíjese que las características son las mismas que en el caso del muelle, pero con una diferencia: la frecuencia no depende de la masa. En efecto, esto podríamos haberlo deducido desde el principio: cuando la única fuerza externa es la fuerza gravitatoria, entonces la aceleración, la velocidad y la posición no dependen de la masa.
Energía del péndulo
Al igual que en el caso del muelle, la energía cinética será: \[E_c=\frac{1}{2}m\omega^2A^2\cos^2\left(\omega t+\varphi_0\right)\]
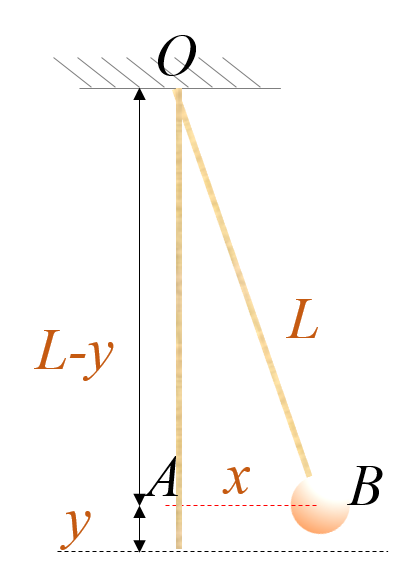
Pero ahora la energía potencial es energía potencial gravitatoria: \[E_p=mgy\] Para conocer \(y\), la altura que asciende el péndulo en cada instante desde la posición más baja, observemos el triángulo rectángulo de la siguiente figura:
De ahí, \[L^2=(L-y)^2+x^2=L^2+y^2-2Ly+x^2=L^2+y^2-2Ly+x^2\] Simplificando y sacando factor común \(y\): \[0=y(y-2L)+x^2\] Dado que el péndulo se desvía poco de la vertical, tendremos que \(y\) es mucho más pequeño que \(2L\), por lo que el paréntesis en la igualdad anterior es aproximadamente: \[y(y-2L)\approx -2Ly\] Y por lo tanto \[0=y(y-2L)+x^2\approx -2Ly+x^2\] de donde: \[y=\frac{x^2}{2L}\] Teniendo en cuenta que \(x(t)\) es un M.A.S., la energía potencial nos queda: \[E_p=mgy=mg\frac{x^2}{2L}=\frac{1}{2}m\frac{g}{L}A^2\sin^2\left(\omega t+\varphi_0\right)\] Finalmente, como \(\omega=\sqrt{\frac{g}{L}}\), \[E_p=\frac{1}{2}m\omega^2A^2\sin^2\left(\omega t+\varphi_0\right)\]
Observamos que las características son las mismas que en el caso del muelle. La única diferencia estriba en el valor de la frecuencia \(\omega\). Por tanto, la energía potencial y cinética se comportan igual que en aquel caso. Además, la energía mecánica: \[E_m=E_p+E_c=\frac{1}{2}m\omega^2A^2\left[\sin^2\left(\omega t+\varphi_0\right)+\cos^2\left(\omega t+\varphi_0\right)\right]\] Y como \(\sin^2R+\cos^2R=1\), \[E_m=E_p+E_c=\frac{1}{2}m\omega^2A^2=\frac{mg}{2L}A^2\] Y se conserva durante el movimiento del péndulo.
Tomemos el caso de un péndulo que parte del reposo con un cierto ángulo inicial. Este caso es idéntico al caso del muelle que se estira y se suelta. la ecuación del movimiento viene dada por: \[x(t)=A\sin\left(\sqrt{\frac{g}{L}}t+\pi/2\right)\] siendo \(A=x(0)\). Es decir, si se suelta el péndulo, éste nunca rebasará la posición inicial, ya que esto significaría aumentar la energía potencial por encima del máximo y por tanto, no se cumpliría el principio de conservación de la energía mecánica.
En el siguiente vídeo se muestra este caso: al profesor Walter Lewin no le importa jugarse su integridad física, puesto que está seguro de que el péndulo, si no le alcanza al principio, no le alcanzará nunca.